机器人底盘集成了许多不同的传感器,包括激光雷达、视觉、超声波、红外传感器,以及车轮和其他必要的悬架。然而,采用相应的算法和软件来收集这些硬件。稳定性测试机器人底盘是最重要的标准,其次是能耗、承载能力和后期的维护费用。
不同的机器人产品对底盘有不同的要求,如地板清扫机器人需要低成本的激光导航方案,其他服务机器人需要灵活和安全的激光雷达+视觉导航方案,而工业AGV需要更精确的导航方案。根据不同类型的机器人底盘,目前市场上的机器人底盘主要分为爬行机器人和轮式机器人底盘。

1.履带机器人底盘:
这种底盘广泛应用于特种机器人,适用于野外、城市环境等领域。它可以在各种复杂的地面上运动,如沙子、泥浆等,但速度相对较低,运动噪声较大。
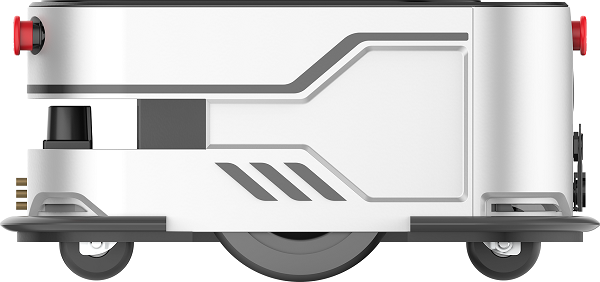
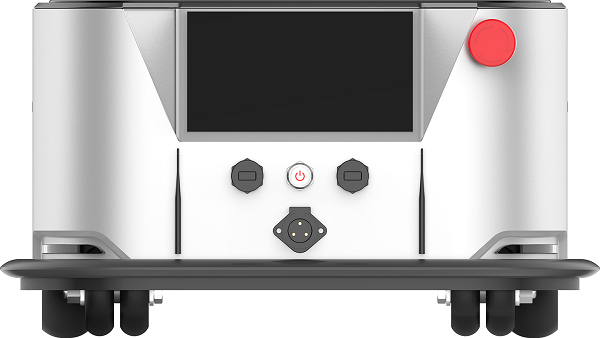
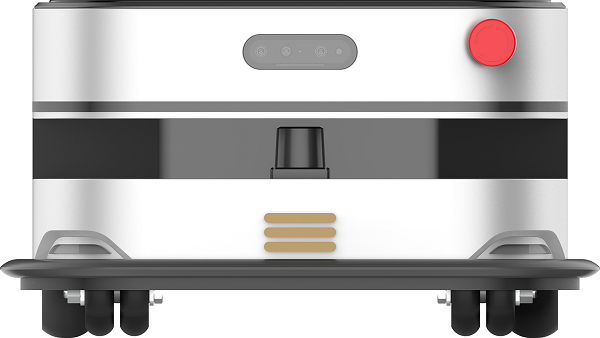
2.轮式机器人底盘:
本产品目前被服务的机器人企业多采用底盘,主要是前轮转向后轮差速器、双轮驱动+万向盘、四轮驱动。
3.前轮转向+后轮驱动
前轮转向+后轮驱动的轮式机器人底盘主要采用电动缸、蜗杆蜗杆等形式实现前轮转向,后轮只需一台电机加差动减速器即可完成机器人的运动要求,具有成本低、控制简单等优点和缺点,但其缺点是转向半径大,使用相对不灵活。
4.双轮驱动+万向轮
根据机器人对重心和转向半径设计的要求,双轮驱动+万向轮可以布置成不同的形式,结构和电机控制相对简单,机器人灵活,算法易于控制。
5.四轮驱动
四轮驱动具有较强的直线行走能力和较大的驱动力,但成本过高,电机控制复杂。为了防止机器人打滑,需要更精细的结构设计。